Robotic fish fins for submarines
Inspired by the efficient swimming motion of bluegill sunfish, MIT scientists are building a mechanical fish fin that is capable of pushing a submarine someday.
The submarine submarine, or AUV automatic underwater engine, currently performs various functions, from ocean floor mapping to shipwreck investigation. But the MIT team hopes to create an underwater robot that is more flexible, better, suitable for military operations such as detecting mines and detecting ports - and they hope to allow the ship to mimic fish movements. bluegill temple.
'If we can create a submarine capable of moving, storing energy and doing everything like a fish, they will be much better than the remote engines they operate on. We have it now, ' said James Tangorra, senior doctor who carried out the study.
The researchers chose to imitate the bluegill sunfish due to its distinctive swimming ability and this ability created continuous acceleration forward without being pulled back.
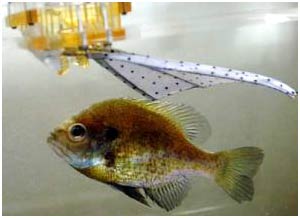
Bluegill sunfish swim in MIT's experimental pool near the robot's fin.(Photo: Donna Coveney)
Dr Tangorra and his colleagues separated the motion of finnage of bluegill sunfish into 19 small movements and which movement analysis is important in achieving tremendous forward thrust . 'We do not want to exactly imitate everything of nature. We want to determine which part is important for pushing and imitating them. '
So far, the team has created the first fins capable of successfully mimicking the fins of sunfish.
The most recent fin is made of thin, flexible and conductive material. This fish has the ability to mimic two movements that scientists determine to be important to the impulse of the sunfish: It is the sweeping motion of the fins and the simultaneous bending of the burr upper and lower edge of fish fin .
When an electric current passes through the fish's fins, it glides forward like sunfish, By changing the direction of the electric current, scientists can make the fins bend forward at the upper edges and edges. The bottom of the fins, but to make fish fins surf and bend at the same time is really a challenge. By cleverly placing Mylar wires along the fins to make the fins move in the desired direction, the scientists succeeded, but the team continued to look for other options.
The first generation fish fins successfully mimicked the surfing and bending movements of the sunfish, but the engines used to control the fin were too big and noisy when used for submarines. The researchers' new method is to use new polymer materials, eliminating the need to use electric motors. This material is made from a chemical solution, allowing the manufacturer to control more than its molecular structure.
In future research, the team plans to study other aspects of the sunfish's movement, including the interaction between different fins, between fins and the fish's body. This will help engineers determine how to adapt the natural laws to the best robot engine manufacturing.
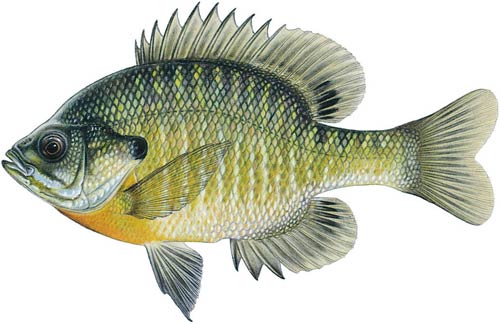
(Photo: dfw.state.or.us)
Thanh Van
- The carp robot can swim like a real fish
- Human feet and hands have evolved from ancient fish fins
- Fish fly like birds to avoid enemies
- Strange, unimaginable things growing on top of
- Things you don't know about arowana
- From fish to humans: The study reveals how the fins have transformed into legs
- The most mysterious mystery submarine cases in the world
- 10 most expensive commercial submarines in the world
- Breaking into Russia's giant atomic submarine
- Why do almost all fish have the same shape?
- Fish walk at depths of more than 3,000 meters at the bottom of the sea
- Ancient fish 'monsters' used fins to walk
 Special weight loss device helps prevent appetite
Special weight loss device helps prevent appetite Daily use inventions come from universities
Daily use inventions come from universities 8 inventors were killed by their own inventions
8 inventors were killed by their own inventions Iran invented a motor car powered by water
Iran invented a motor car powered by water