Control system for body rotation and engine torque
In 1992, many experts introduced the concept of ' Car Body Rotation ' as a new technology to enhance automobile dynamics by controlling the torque division for wheels. on active bridges.
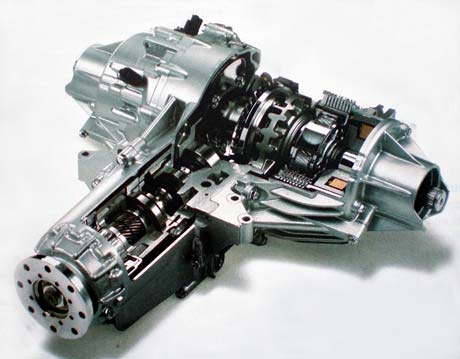
Figure 1: Structure
In 1996, Honda added a revolving body angle that could also control the rotation of the torque for wheels on a guide bridge for two-wheeled vehicles. The so-called ' Active Torque Switch System ' (ATTS) is used in the Honda Prelude.
By 2004, Honda developed the DYC AWD system and controlled torque division between all the wheels on the bridges. This system is manufactured under the name SH-AWD and used for Honda Legend cars in the US market. Recently the new car gearbox, ' Torque Vectoring ' (torque control), is a dynamic torque control gearbox to enhance the engine's traction and automotive dynamics features. Honda offers a system that combines these two technologies called ' Control system that combines body rotation and engine torque' (DYC Torque Vectoring).
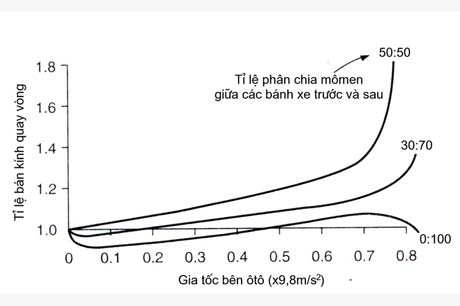
Figure 2
The torque from the engine to the wheels greatly affects the efficiency of turning around the car. When the torque impacts on the rear demand (70%), self-driving is possible. This suggests that the speeding effect of cars is accelerating will vary by proportion of torque distribution between bridges. If the torque ratio between the two bridges is greatly adjusted, it is not possible to effectively change the lateral acceleration, and reduce the minimum turning radius clearly, so that the car cannot Rotate well with constant speed without torque adjustment between the two sides of the wheel. That is illustrated on the graph (Figure 2).
The change in the torque change ratio between the wheels on both sides of a bridge not only changes the rotation characteristics but also increases the side acceleration of the car. Based on the value of the deflection angle at the center of the car focus (concrete), experts provide a method to control the torque of the car under driving conditions. This is used in the DYC Torque Vectoring system based on automotive dynamics characteristics (known as calf correction method).
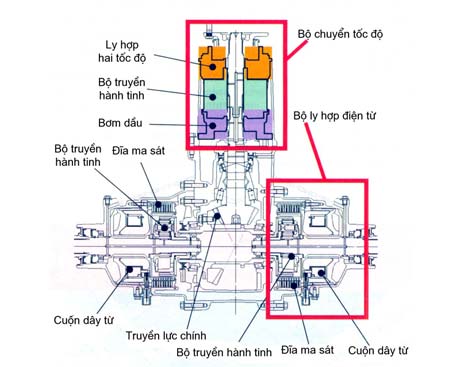
Figure 3: Diagram of operating principle
The SH-AWD system allows torque control at the wheels in turnaround conditions using transmitters: a transmitter used to accelerate the rear axle speed more actively than the front bridge by about 5% when turning around. Figure 3 diagram of SH-AWD system layout on cars and cross-sectional view of rear axles.
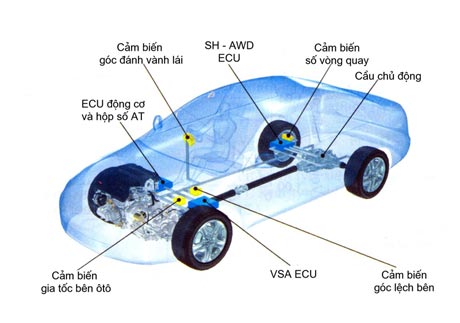
Figure 4: System layout diagram
This transmission set in front of the rear axle has two speed levels: low and high to increase the number of rear axle spindles, hypoid transmissions to transfer the number of revolutions from the shaft to the two differentials on two wheels. on both sides, two electromagnetic clutches on the two sides of the shaft, another electromagnetic coil placed in the clutch to identify the magnetic field to compensate the magnetic force when the clutch gap changes during the transition of operation.
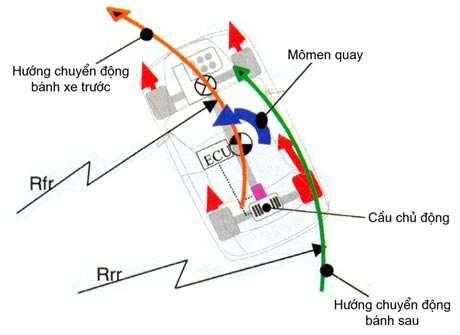
Figure 5
Test results of the DYC Torque Vectoring system with actual vehicles have created the following effects:
1. Under normal and special driving conditions, DYC Torque Vectoring participates in torque control to turn cars from normal driving conditions to limits.
2. Control torque distribution on left-right wheels to limit lateral acceleration when turning to ensure torque at the wheels corresponding to the load. This increases the total force at the wheel when spinning.
3. Rotational torque control so that the motion is always in balance with the rotation between the front and rear wheels is very necessary. The force will decrease in the front wheel and increase in the rear wheel. Therefore, limit the lack of rotation.
At the same time, SH-AWD is a system that connects two wheel differentials to reduce excess rotation without affecting auto stability. As a result, cars have the ability to stabilize rotation with proper turning radius.
MSc: Trương Đặng Việt Thắng
- If the Earth suddenly reverses the direction of rotation, we will have an unbelievably good result
- Principle of operation of car ignition system
- NASA tested the new proton engine system for spacecraft
- 99% of bacteria in the human body are not known
- Increasing the rotation rotation will increase yields in a sustainable manner
- NASA tries the ion engine that can take people to Mars
- Secrets of the system
- The world's smallest W32 engine - mechanical
- A SpaceX rocket engine exploded during testing
- The smallest engine in the world is a million times smaller than an ant
- India's most modern airborne early warning and control system
- Upgrade control system of Da Lat nuclear reactor
 'Barefoot engineer' invents a pipeless pump
'Barefoot engineer' invents a pipeless pump Process of handling dead pigs due to disease
Process of handling dead pigs due to disease Radiometer
Radiometer Warp Engine: Technology brings us closer to the speed of light
Warp Engine: Technology brings us closer to the speed of light