Robot explorer Mars moves worm-type
The US Aeronautics and Space Agency (NASA) will release a self-propelled Martian exploratory device filled with liquid and can move on the surface of the Red planet like a worm.
According to Patent Yogi, the US Patent and Trademark Office announced the autonomous machine's design on January 6. NASA describes this robot as a large bubble filled with liquid containing smart polymer materials that remember shape.
Outside the bubble is a shell with many protrusions, allowing the self-propelled device to adhere to the surface to move. Inside the device are 4 different valve combinations that can suck liquid from one cavity and pump into another cavity of the bubble.
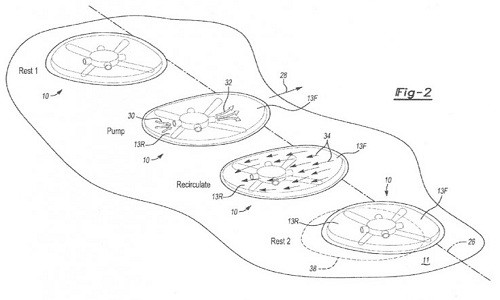
The amorphous robot consists of 4 valve combinations that pump liquid from one compartment to another to move.(Photo: US Patent and Trademark Agency).
The valves will alternately control the flow of liquids in different directions in the bubble, allowing the bubble to adjust its shape and size to the front.
In order for the autonomous device to travel across the planet's surface like a worm , the bubble section also features flexible long tubes, containing ferrofluid, a powerful magnetic liquid if in a magnetic field and an electromagnet can move. When a magnet electrically charges or releases energy, the flexible tube will lengthen or shorten accordingly in the direction of fluid movement, allowing the device to self-propel forward on the ground like a worm.
When landing on the planet's surface, traditional self-propelled devices often run on the ground. In environments such as sand or humus such as the Moon or Mars, these devices can be entangled and stuck, according to NASA.
Miniature explorers can be used to probe under rubble or cramped areas that people cannot reach. Traditional self-propelled devices proved to be less superior in these cases due to some design limitations.
NASA says amorphous robots can solve the problem because they change shape in the direction of a predetermined motion, so more flexible on surfaces and better protected against obstacles. These types of robots are very useful in exploring areas of Mars that today's self-propelled devices cannot respond to such as small craters and steep hillsides.
- Revealed 'explorer' will go to Mars in 2020
- Curiosity robot moves by itself
- NASA is about to launch new Mars explorer robots: Find alien life
- NASA declares: Humans can live on Mars!
- Robot ball explores Mars
- Mars explorer robot fails a sensor
- NASA developed the Mars helicopter drone
- India 'uplifted' for the mission to explore Mars
- Space explorer robot
- This robot worm will be what you use every day in the future
- Build a 'green oasis' to plant trees on Mars, why not?
- Snake robot can go to Mars
 Van Allen's belt and evidence that the Apollo 11 mission to the Moon was myth
Van Allen's belt and evidence that the Apollo 11 mission to the Moon was myth The levels of civilization in the universe (Kardashev scale)
The levels of civilization in the universe (Kardashev scale) Today Mars, the sun and the Earth are aligned
Today Mars, the sun and the Earth are aligned The Amazon owner announced a secret plan to build a space base for thousands of people
The Amazon owner announced a secret plan to build a space base for thousands of people