Explore the moon with a gibbon
The Center for Artificial Intelligence Research (DFKI), based in Bremen, Germany, has launched a robot-shaped design of a gibbon for the purpose of exploration and exploration of the moon.
Gibbon robots will explore the moon in the future
DFKI hopes their new robot design, called iStruct Demonstrator, the "Charlie" nickname , is capable of achieving gibbon stability and flexibility when climbing and moving across a variety of terrain. .
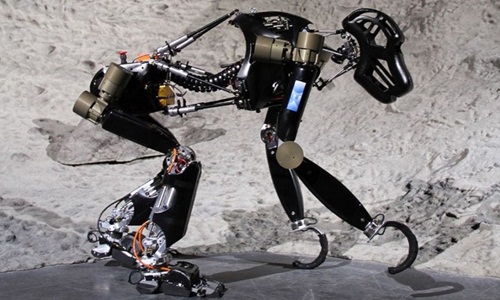
A model of moon-roaring gibbon robot developed by the German Center for Artificial Intelligence Research.(Photo: DFKI)
" We selected gibbons to be able to study more modes of movement, " CNN quoted Daniel Kuhn, expert at DFKI, as saying. "They have the ability to walk on four legs very firmly but still stand with their hind legs and use their front legs to hold and climb. The ability to change the gibbon's flexible posture makes us feel like interesting ", he added.
The biggest advantage of gibbons is that they can choose to move in accordance with each specific condition. " If the environment does not allow walking on two legs, they can switch to 4 feet. When the environment changes, walking on two legs will help them have better vision ," Kuhn explained.
Made by DLR space agency, Germany, this project also built a hypothetical moon environment to test the samples.
" Overall, we are happy with the results," Kuhn said. "Our robot can climb the slope about 20 degrees. Currently, we are continuing to study how to convert from four-legged to bipedal posture."
Most of the previous robots are only equipped with a single-pin connection system to simplify design and control. But the robot model of DFKI is focused on developing a sophisticated spending structure to simulate the complex operation of gibbons. Robots also have various sensors installed to help them collect information more efficiently.
In particular, "Charlie " is one of the first robot models to have a spine. They are strong enough to support the robot body weight and carry between 20 and 25 kg more.
Types of robots that explore the moon need to perform many different functions. They not only observe, drill, grind, search, refine material, but also move in a vacuum with many harsh conditions. In addition, robots must be able to repair themselves if problems occur.
According to Kuhn, the current "Charlie " model needs to continue research and development over the next three to four years before being able to operate in space.
Gibbon robot "Charlie" changed posture
"Charlie" gibbon robot moves on 4 legs
- New NASA research: Water and humans can be found on the Moon, so come back soon
- Russia is expected to send people to the Moon by 2020
- Video: ESA's idea of moon discovery robots
- NASA revealed the time of the first immigration settlement on the Moon
- Russia conquered the Moon in 2030
- Motherhood between dogs and gibbons
- German robots will explore the Moon
- NASA announced 8,400 photos of the process of exploring the Moon
- Mr. Trump is determined to bring the Americans back to the Moon
- Put unmanned aircraft on Saturn's moon
- Google Maps complements the Moon map and many other planets
- Here are 7 resources that we will exploit from the Moon
 The world's first sexless AI voice
The world's first sexless AI voice This cool t-shirt will make you invisible to AI
This cool t-shirt will make you invisible to AI AI can predict personality only through selfie photos
AI can predict personality only through selfie photos The world-famous chess player lost to Golaxy before, artificial intelligence 'made in China'
The world-famous chess player lost to Golaxy before, artificial intelligence 'made in China'